CORRIGES
EXERCICE I:
1.
Sa pulsation propre:
![]() =
=![]()
Sa fréquence propre
![]() =
=![]()
Sa période propre est:
![]()
2. Equation
horaire de la position du centre d’inertie:
![]()
A l’instant
initial, ![]() donc
donc
![]() =>
=> ![]() soit
soit ![]()
L’expression de l’élongation a tout instant est: x(t)=5.10-2sin(5t +π/2)
Equation horaire de la vitesse: v(t)= 5.10-2x5cos(5t +π/2)= 25.10-2 cos(5t +π/2),
3.La vitesse maximale est vmax=xmω0=5.10-2 x5=25.10-2 m.s-1.
EXERCICE II:
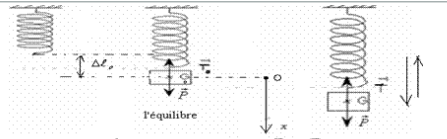
1.Le système étudié : le corps S à l'équilibre
Bilan des forces :
À l'équilibre le corps S est soumis à l'action des forces suivantes :
![]() : son poids.
: son poids.
![]() : la tension
du ressort à l'équilibre.
: la tension
du ressort à l'équilibre.
D'après la condition d'équilibre du corps S on a donc:
To =P = m.g = KΔl0 => Δl0= m.g /K = 0,2 x 10/ 20 =0,1m=10 cm
2) -Le système étudié :{le corps S } lorsqu'il effectue des oscillations.
- Bilan des forces: pendant son mouvement le corps S est soumis à l'action des forces suivantes :
![]() : son poids.
: son poids.
![]() : la tension
du ressort.
: la tension
du ressort.
On considère un repère (O, ⃗i ) , son origine O est confondu avec le centre d'inertie G0 du corps S à l'équilibre.
D’après le TCI:
![]()
Par projection sur l'axe ox on a:
P - T= ma <=>mg-kΔl=ma donc mg-k(Δl0 +x)=ma
<=>mg-k Δl0-kx=ma
D’apres la condition d’equilibre,
mg= k Δl0
donc -kx=ma avec ![]()
![]()
C'est l'équation différentielle du mouvement.
3.La solution de l'équation différentielle :
x¨ + K m x=0 est: x = xmcos(ω0 t + φ)
D'après les données on a : ωo = √ m /K = √ 0,2 /20 = 10rad/s et xm =3cm
Et d'après les conditions initiales :
à t=0 , x=0 donc 0 = xmcosφ
=> φ= ± π/ 2
de plus le corps passe de la position d'équilibre stable Go dans le sens positif donc v>0 à t=0.
Et on a: x = xm .cos(ωo .t + φ) →
v = x˙ = -xm ωo.sin(ωot+φ) donc à t=0 :
v = -xm .ω o sin φ> 0 → sinφ < 0 donc φ< 0
d’où: φ = - π/ 2
L'équation horaire du mouvement est :
x = 3.10-2.cos(10t - π /2 )
4) La période propre du mouvement. :
To = 2 π . √ m/ K = 2 π . √ 0,2/ 20 ≈ 0,628 s
EXERCICE III :
1) Système étudié {le corps solide à l’équilibre}
Bilan des forces :
![]() : poids du
cavalier.
: poids du
cavalier.
![]() : la tension
du ressort à l'équilibre.
: la tension
du ressort à l'équilibre.
![]() : réaction
du plan de contact elle est perpendiculaire au plan de contact car les
frottements sont négligeables.
: réaction
du plan de contact elle est perpendiculaire au plan de contact car les
frottements sont négligeables.
Condition d’équilibre :
![]()
![]()
Par projection sur l'axe ox:
P.sin a – To +0 =0 → m.g.sin a - k.∆lo = 0 donc : ∆lo = m. g.sinα/ k
AN: ∆lo = 0,2.sin 30 x 10 /20 =0,05 m=5 cm
2) Système étudié {le corps solide}
Bilan des forces:
![]() : poids du
cavalier.
: poids du
cavalier.
![]() : la tension
du ressort lors du mouvement.
: la tension
du ressort lors du mouvement.
![]() : réaction
du plan de contact elle est perpendiculaire au plan de contact car les
frottements sont négligeables
: réaction
du plan de contact elle est perpendiculaire au plan de contact car les
frottements sont négligeables
En appliquant la deuxième loi de Newton:
![]()
![]()
Par projection sur l’axe ox:
Psinα-T=m![]()
Psinα-k(Δl0 + x )=m![]()
Psinα-k(Δl0) -kx =m![]()
-kx =m![]()
=>![]()
1) la solution de cette équation différentielle est de la forme suivante :
x = xm .cos(ω o .t + φ ) avec :
ω o = √ m/ K = √ 0,2 20 = 10rad / s et xm = 2cm
Pour déterminer la valeur de φ, on utilise les conditions initiales :
à t=0, on a: x=1cm
En remplaçant dans (1) on a:
1 = 2.cos φ → cos φ = 1 /2
d’où: φ=cos −1 1 /2 = ±π/ 3
Or le corps passe à t=0 du point d’abscisse x=+1cm dans le sens positif, donc sa vitesse v>0 à t=0.
Et on a : v = x˙ =-x. ω0sin(ω0.t+ φ ) et à t=o : v=-xm.ω0sin φ >0
φ = - π/ 3 d' où : φ < 0 donc: sin φ < 0
Équation horaire du mouvement : x = 2. 10-2 cos (10.t – π/3 )
EXERCICE IV:
Le système étudié : le corps S à l'équilibre
Bilan des forces :
À l'équilibre le corps S est soumis à l'action des forces suivantes :
![]() : son poids.
: son poids.
![]() : la tension
du ressort à l'équilibre.
: la tension
du ressort à l'équilibre.
D'après la condition d'équilibre du corps S on a donc:
To =P = m.g = KΔl0 =>
Δl0= m.g /K = 0,5 x 10/ 20 =25 cm
2) a-Le système étudié :{le corps S } lorsqu'il effectue des oscillations.
- Bilan des forces: pendant son mouvement le corps S est soumis à l'action des forces suivantes :
![]() : son poids.
: son poids.
![]() : la tension
du ressort.
: la tension
du ressort.
On considère un repère (O, ⃗i ) , son origine O est confondu avec le centre d'inertie G0 du corps S à l'équilibre.
D’après le TCI:
![]()
Par projection sur l'axe ox on a :
P - T= ma <=>mg-kΔl=ma
donc mg-k(Δl0 +x)=ma
<=>mg-k Δl0-kx=ma
D’apres la condition d’equilibre,
mg= k Δl0
donc -kx=ma avec ![]()
![]()
C'est l'équation différentielle du mouvement.
D'après les données on a : ωo = √ m /K = √ 20 /0,5 = Ѵ40 rad/s
b-La solution de l'équation différentielle :
x¨ + K /m x=0 est: x = xm .cos(ω0 t + φ)
xm=5 cm
Et d'après les conditions initiales :
à t=0 , x= xm = xm. cosφ => φ= 0 (2π)
L'équation horaire du mouvement est :
x = 5.10-2.cosѴ40t (s )
c- Premier passage en O a t1=T0/4= π/2ω0
=>
EXERCICE V:
Avis sur la nature de l’oscillateur
Il s’agit de déterminer la nature de l’oscillateur afin de départager les deux
élèves. Pour cela, nous allons :
(i) Exploiter les résultats des expériences pour déterminer la nature de
l’oscillateur;
(ii) conclure.
D’après les documents 2 et 3, l’énergie et la position de l’oscillateur
décroissent avec le temps ; la perte de l’énergie au cours du temps est du à la
présence des forces de frottements ; ceci est une caractéristique d’un
oscillateur réel (oscillateur libre et amorti)
Conclusion : au vu de ce qui précède, l’oscillateur en question est un
oscillateur libre et amorti ; donc c’est l’élève qui aura dit que c’est un
oscillateur libre et amorti qui a raison.
Avis sur les caractéristiques de l’oscillateur
Il s’agit de déterminer les caractéristiques (constante de raideur k du ressort
et masse m du mobile) de l’oscillateur.
Pour cela, nous allons exploiter les résultats des expériences pour :
(i) déterminer la constante de raideur k à partir de l’énergie potentielle
maximale de l’oscillateur ;
(ii) déterminer la période de l’oscillateur ;
(iii) déduire la masse m du mobile ;
(iv) conclure.
- détermination de la constante de raideurk:
d’après le document 3,EPe=2,4×10−3 J; alors,
EPe=12kx20⇒k=2Epex20=3N/m.
- détermination de la masse m du mobile :
T0=2π√m/k⇒m=kT20/4π2=0,0486
kg
Conclusion : L’oscillateur en question est caractérisé par les
grandeursketmde valeur respective
:k=3N/m,m=0,0486kg